
ระบบควบคุมการจราจรหุ่นยนต์ AGV ขนาด 1.2 ตัน
โจทย์ที่ได้รับ: โรงงานผลิตยางรถยนต์ชั้นนำต้องการเปลี่ยนระบบขนส่งม้วนยางขนาดใหญ่ (น้ำหนัก 1.2 ตัน) จากการใช้คนขับ Forklift มาเป็นระบบอัตโนมัติ (AGV) เพื่อลดความเสี่ยงอุบัติเหตุและแก้ปัญหาขาดแคลนแรงงาน
ความท้าทาย:
- น้ำหนักมหาศาล: ความผิดพลาดเพียงเล็กน้อยอาจก่อให้เกิดความเสียหายรุนแรง
- พื้นที่จำกัด: ทางเดินรถสวนกันได้ยาก ต้องมีการจัดการจราจรที่แม่นยำ 100%
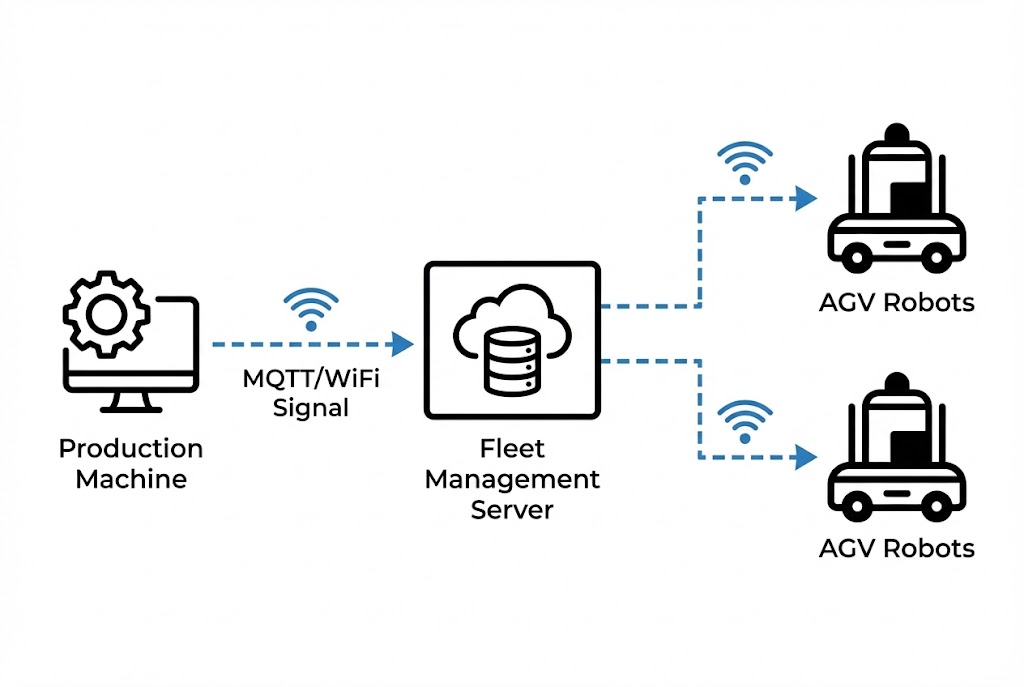
- ระบบเดิม: ต้องเชื่อมต่อกับเครื่องจักรเก่า (Legacy Machine) ที่มีอยู่เดิม
แนวทางการแก้ปัญหาของเรา
ทีมงาน WP Solution พัฒนา “Fleet Management System” ซึ่งเปรียบเสมือน “หอบังคับการบิน” สำหรับหุ่นยนต์ โดยใช้ C# เขียนอัลกอริทึมคำนวณเส้นทางแบบ Real-time
ฟังก์ชันการทำงานหลัก
- Job Queueing: รับคำสั่งจากหน้างานและจัดคิวให้ AGV ที่ว่างที่สุดไปรับงาน
- Traffic Control: ระบบ “จองเส้นทาง” (Node Reservation) ป้องกันรถ 2 คันวิ่งมาจ๊ะเอ๋กันในทางแคบ
- Auto Charging: เมื่อแบตเตอรี่ต่ำกว่าเกณฑ์ รถจะขออนุญาตปลีกตัวไปชาร์จไฟเองทันที
เทคโนโลยีที่ใช้ (Tech Stack)
- C# (.NET Windows Service): ประมวลผล Logic การจราจรและคำนวณเส้นทาง
- MariaDB: เก็บข้อมูล Transaction และ Log การทำงานย้อนหลัง
- Wireless Protocol: สื่อสารกับตัวรถผ่าน TCP/IP บนเครือข่าย Industrial WiFi
ผลลัพธ์ที่ได้ (Business Impact)
- ✅ ความปลอดภัยสูงสุด: ลดอุบัติเหตุจากการชนกันในไลน์ผลิตเป็น 0%
- ✅ ลดเวลารอคอย: ระบบคำนวณเส้นทางที่สั้นที่สุด ลด Deadlock ของรถ
- ✅ ตรวจสอบได้: ผู้บริหารดูสถานะรถทุกคันได้ผ่านหน้าจอ Dashboard
เกร็ดความรู้จากหน้างาน: “การทำระบบ AGV ในพื้นที่แคบ สิ่งสำคัญคือ Logic การ ‘หลีกทาง’ เราออกแบบให้รถเปล่าต้องหลบทางให้รถที่มีของหนักเสมอ เพื่อลดการเบรคกระทันหันและประหยัดพลังงาน”
ต้องการที่ปรึกษาระบบ Automation? ติดต่อเรา: wisit.paewkratok@gmail.com | Line: wisit.p