
บทนำ
ปัจจุบันภาคการเกษตรทั่วโลกกำลังเผชิญกับความท้าทายครั้งใหญ่คือ “ปัญหาการขาดแคลนแรงงาน” ซึ่งเป็นผลพวงมาจากการขยายตัวของสังคมเมือง (Urbanization) ข้อมูลระบุว่าผลผลิตทางการเกษตรทั่วโลกลดลงถึง 2,000 ล้านตันต่อปีอันเนื่องมาจากปัญหานี้ นอกจากนี้ การทำเกษตรแบบดั้งเดิมยังต้องพึ่งพาแรงงานคนในการทำงานซ้ำๆ (Repetitive Tasks) ที่เหนื่อยล้า ซึ่งมักนำไปสู่ Human Error และต้นทุนที่บานปลาย
เพื่อแก้ปัญหา (Pain Point) เหล่านี้ เทคโนโลยี “โดรนและหุ่นยนต์การเกษตร” จึงเข้ามาเป็นโซลูชันสำคัญที่พลิกโฉมหน้าไร่นา จากการใช้แรงงานคนอย่างหนักไปสู่ระบบอัตโนมัติอัจฉริยะ วันนี้เราจะมาเจาะลึกกันว่า ในมุมมองของ System Architecture หุ่นยนต์เหล่านี้ทำงานประสานกันอย่างไร
ทฤษฎีและเทคโนโลยีเบื้องหลัง (Core Concept)
เทคโนโลยีหุ่นยนต์ในฟาร์มถูกแบ่งออกเป็น 2 กลุ่มหลัก ซึ่งแต่ละกลุ่มมี Tech Stack เบื้องหลังที่น่าสนใจต่างกัน:
1. อากาศยานไร้คนขับ (UAVs/Drones): นักสำรวจและผู้ดูแลทางอากาศ
โดรนการเกษตรไม่ได้มีหน้าที่แค่บินถ่ายภาพ แต่คือ “Edge Node” ที่เคลื่อนที่ได้:
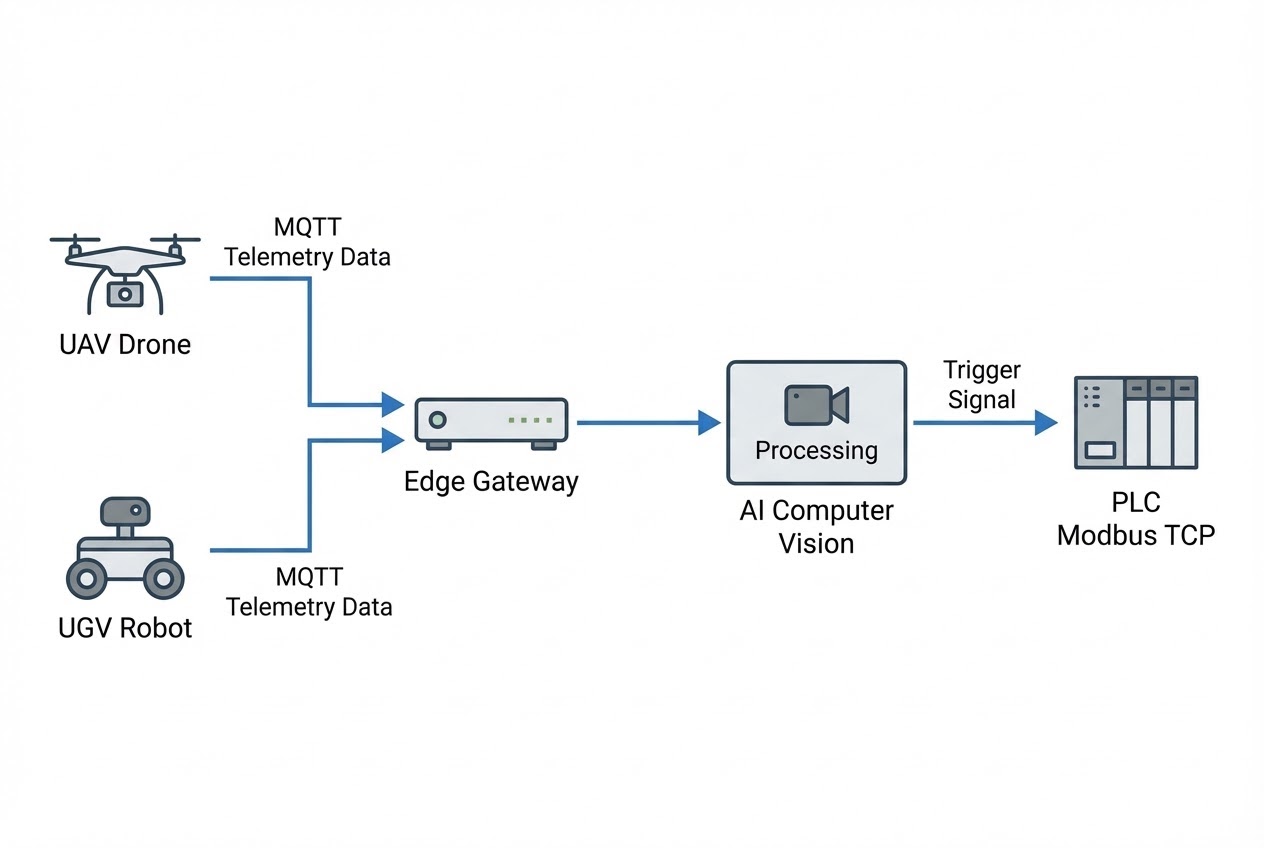
- การบินสำรวจและประเมินสุขภาพพืช: โดรนจะติดตั้งกล้อง Multispectral Camera บินสำรวจและประมวลผลเป็นดัชนี NDVI ข้อมูล Telemetry และภาพถ่ายจะถูกส่งผ่านเครือข่าย 4G/5G เข้าสู่ MQTT Broker เพื่อให้ระบบส่วนกลางวิเคราะห์จุดที่เกิดโรค
- การบินพ่นยาแม่นยำ (Precision Spraying): โดรนสามารถรับพิกัดเป้าหมาย (Waypoints) จากระบบส่วนกลาง แล้วบินไปฉีดพ่นสารเคมีเฉพาะจุด ซึ่งช่วยลดเวลาการทำงานได้ถึง 80% ลดการใช้น้ำ 90% และประหยัดสารเคมีได้ถึง 50%
2. หุ่นยนต์ภาคพื้นดิน (UGVs): ขุมพลังที่ไม่มีวันเหน็ดเหนื่อย
หุ่นยนต์ภาคพื้นดินมักใช้ระบบ ROS (Robot Operating System) ทำงานร่วมกับ PLC ในการควบคุมกลไกทางกายภาพ:
- หุ่นยนต์เก็บเกี่ยวผลไม้ (Harvesting Robots): ใช้กล้องอุตสาหกรรมร่วมกับ Machine Vision เพื่อหาพิกัด 3D ของผลไม้ ส่งข้อมูลให้แขนกล (Robot Arm) ทำการหยิบจับอย่างทะนุถนอมตลอด 24 ชั่วโมง
- หุ่นยนต์กำจัดวัชพืช (Weeding Robots): ใช้ AI แบบ Real-time Inference (เช่น โมเดล YOLO) คัดแยกพืชผลออกจากวัชพืช แล้วสั่งการระบบหัวฉีดเฉพาะจุด (Spot Spraying) หรือกลไกถอนราก
- รถแทรกเตอร์ไร้คนขับ (Autonomous Tractors): วิ่งตามเส้นทางที่กำหนดด้วยระบบ GPS แบบ RTK (Real-Time Kinematic) ระดับเซนติเมตร ร่วมกับเซนเซอร์ LiDAR ป้องกันการชน
ตัวอย่างการเขียน Code ควบคุมระบบฉีดพ่น (C# & PLC Integration)
ในระบบ Weeding Robot ทั่วไป เมื่อกล้อง Vision ตรวจพบวัชพืช โปรแกรมหลัก (มักเขียนด้วย C# หรือ C++) จะต้องประมวลผล Bounding Box และคำนวณว่าต้องเปิดวาล์วฉีดพ่น (Solenoid Valve) หัวไหน โดยส่งคำสั่งไปยัง PLC หน้างานผ่าน Modbus/TCP
// ตัวอย่าง C# .NET สั่งงาน PLC ให้เปิดหัวฉีด (Spray Valve) เมื่อ AI เจอวัชพืช
using System;
using System.Net.Sockets;
using Modbus.Device;
public class SpotSprayingController
{
private string plcIp = "192.168.1.50";
public void ProcessVisionDetection(string label, double confidence, int boxX)
{
// กรองเฉพาะเป้าหมายที่เป็น "วัชพืช" และความแม่นยำสูงกว่า 80%
if (label == "Weed" && confidence > 0.80)
{
// คำนวณหาหัวฉีดที่ตรงกับตำแหน่ง X ของวัชพืชในภาพ
ushort nozzleCoilAddress = CalculateNozzleAddress(boxX);
// สั่งเปิดหัวฉีดผ่าน Modbus TCP ไปยัง PLC
TriggerSprayValve(nozzleCoilAddress);
}
}
private void TriggerSprayValve(ushort coilAddress)
{
using (TcpClient client = new TcpClient(plcIp, 502))
{
ModbusIpMaster master = ModbusIpMaster.CreateIp(client);
// สั่งเปิดวาล์ว (True) ที่ Address ที่กำหนด
master.WriteSingleCoil(coilAddress, true);
Console.WriteLine($"Spray triggered at Nozzle Address: {coilAddress}");
}
}
private ushort CalculateNozzleAddress(int boxX) { /* Logic เทียบบัญญัติไตรยางศ์ */ return 1; }
}
ตัวอย่างการใช้งานจริงระดับโลก (Global Use Cases)
- 🍓 Harvest CROO Robotics & FFRobotics: พัฒนาหุ่นยนต์เก็บสตรอว์เบอร์รีและแอปเปิล ใช้ Machine Vision ประมวลผลภาพเพื่อระบุความสุกของผลไม้ ลดความเสี่ยงผลผลิตเน่าเสียค้างต้น และแก้ปัญหาคนงานขาดแคลนในฤดูเก็บเกี่ยว
- 🌿 Blue River Technology (See & Spray) & AVO: เทคโนโลยีหุ่นยนต์ตรวจจับและฉีดพ่นอัจฉริยะ AI จะแยกแยะวัชพืชและสั่งฉีดพ่นสารเคมีแบบเจาะจงจุดเท่านั้น ช่วยลดต้นทุนค่ายาและสารเคมีกำจัดวัชพืชได้มหาศาลถึง 90%
- 🚜 รถแทรกเตอร์ไร้คนขับ Mahindra E8: รถแทรกเตอร์ EV เต็มรูปแบบจากอินเดีย ผสาน GPS และเซนเซอร์รอบคัน ไถพรวนและหยอดเมล็ดในพื้นที่ขนาดใหญ่ได้เอง พร้อมหลบหลีกสิ่งกีดขวาง ลดข้อผิดพลาด (Human Error) อย่างเต็มประสิทธิภาพ
Pro Tip / ข้อควรระวังจากหน้างาน: ปัญหาปราบเซียนของการทำ Machine Vision ในพื้นที่การเกษตร คือ “แสงแดดที่เปลี่ยนแปลงตลอดเวลา” (Glare & Shadows) โมเดล AI ที่เทรนในแล็บมักจะทำงานพังเมื่อเจอแดดเที่ยงวัน เทคนิคของวิศวกรคือการสร้างที่ครอบแสง (Shroud) เพื่อควบคุมแสงหน้ากล้อง และใช้แสงประดิษฐ์ (LED) หรือการใช้กล้อง Infrared ในการทำงานแทนภาพ RGB ปกติ
สรุป
การนำโดรนและหุ่นยนต์การเกษตรเข้ามาประยุกต์ใช้ ไม่ใช่แค่การเอาเครื่องจักรมาแทนที่คน แต่เป็นการทำ Digital Transformation จากอุตสาหกรรมที่ใช้แรงงานเข้มข้น สู่การขับเคลื่อนด้วยเทคโนโลยี การผสานเซนเซอร์อัจฉริยะ, AI, Computer Vision และ PLC เข้าด้วยกัน จะช่วยลดต้นทุน เพิ่มผลผลิต และยกระดับความยั่งยืนได้อย่างแท้จริง
กำลังมองหาโซลูชันด้าน Machine Vision หรือการเชื่อมต่อหุ่นยนต์เข้ากับ PLC อยู่หรือไม่? หากฟาร์มหรือโรงงานของคุณต้องการทีมผู้เชี่ยวชาญในการออกแบบและติดตั้งระบบ Agricultural Robotics หรือ Smart Automation แบบครบวงจร พูดคุยกับทีมวิศวกรของ WP Solution ได้ที่: wisit.paewkratok@gmail.com | Line: wisit.p